机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆角速度w2.角度是45度,AB逆时针运动B-|||-2-|||-45°-|||-题 1-16 图 曲柄滑块机构
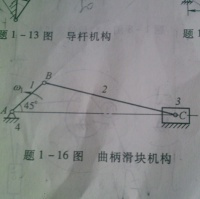
机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆角速度w2.
角度是45度,AB逆时针运动
参考答案与解析:
-
相关试题
-
机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄[1]滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆[2]角速度w2.
-
机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄[1]滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬
- 查看答案
-
机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄[1]滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆[2]角速度w2.
-
机械设计第一章平面机构的自由度和速度分析相关题题1-16图所示曲柄[1]滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬
- 查看答案
-
1-14 求出图 1-19 正切机构的全部瞬心。设 (omega )_(1)=10rad/s ,求构件3的速度v3。-|||-2-|||-1 -3-|||-w-|||-45 北-|||-100-|||
-
1-14 求出图 1-19 正切机构的全部瞬心。设 (omega )_(1)=10rad/s ,求构件3的速度v3。-|||-2-|||-1 -3-|||-w-
- 查看答案
-
设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K=1.5,滑块的冲程lC1C2=50mm,导路的偏距e=20mm,求曲柄长度lAB和连杆长度lBC。
-
设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K=1.5,滑块的冲程lC1C2=50mm,导路的偏距e=20mm,求曲柄长度lAB和连杆长度lBC。设计一偏
- 查看答案
-
四、设计题(10 分)设计一曲柄[1]滑块机构。已知滑块的行程 s=50mm,偏距 e=16mm,行程速度变化系数K=1.2,求曲柄和连杆[2]的长度。
-
四、设计题(10 分)设计一曲柄[1]滑块机构。已知滑块的行程 s=50mm,偏距 e=16mm,行程速度变化系数K=1.2,求曲柄和连杆[2]的长度。四、设计
- 查看答案
-
四、设计题(10 分)设计一曲柄[1]滑块机构。已知滑块的行程 s=50mm,偏距 e=16mm,行程速度变化系数K=1.2,求曲柄和连杆[2]的长度。
-
四、设计题(10 分)设计一曲柄[1]滑块机构。已知滑块的行程 s=50mm,偏距 e=16mm,行程速度变化系数K=1.2,求曲柄和连杆[2]的长度。四、设计
- 查看答案
-
设计一曲柄滑块机构。已知滑块的行程s=50mm,偏距e=16mm,行程速度变化系数K=1.2,求曲柄和连杆的长度。
-
设计一曲柄滑块机构。已知滑块的行程s=50mm,偏距e=16mm,行程速度变化系数K=1.2,求曲柄和连杆的长度。设计一曲柄滑块机构。已知滑块的行程s=50mm
- 查看答案
-
【计算题】如图所示的偏置曲柄滑块机构,已知行程速度变化系数K=1.5,滑块行程h=50mm,偏距e=20mm,试用图解法求:曲柄长度LAB和连杆长度LBC
-
【计算题】如图所示的偏置曲柄滑块机构,已知行程速度变化系数K=1.5,滑块行程h=50mm,偏距e=20mm,试用图解法求:曲柄长度LAB和连杆长度LBC【计算
- 查看答案
-
图示曲柄滑道机构中,曲柄长OA=100mm,并绕O轴转动.在某瞬时,其角速度ω=1rad/s,角加速度α=1rad/s 2 ,∠AOB=30°.求导杆上C点的加速度和滑块A在滑道中的相对加速度。
-
图示曲柄滑道机构中,曲柄长OA=100mm,并绕O轴转动.在某瞬时,其角速度ω=1rad/s,角加速度α=1rad/s 2 ,∠AOB=30°.求导杆上C点的加
- 查看答案
-
已知图示曲柄摇块机构各构件的长度,试在图上标出机构的全部瞬心位置。若已知曲柄的角速度ω1,试用瞬心法求构件3的角速度ω3 。
-
已知图示曲柄摇块机构各构件的长度,试在图上标出机构的全部瞬心位置。若已知曲柄的角速度ω1,试用瞬心法求构件3的角速度ω3 。已知图示曲柄摇块机构各构件的长度,试
- 查看答案