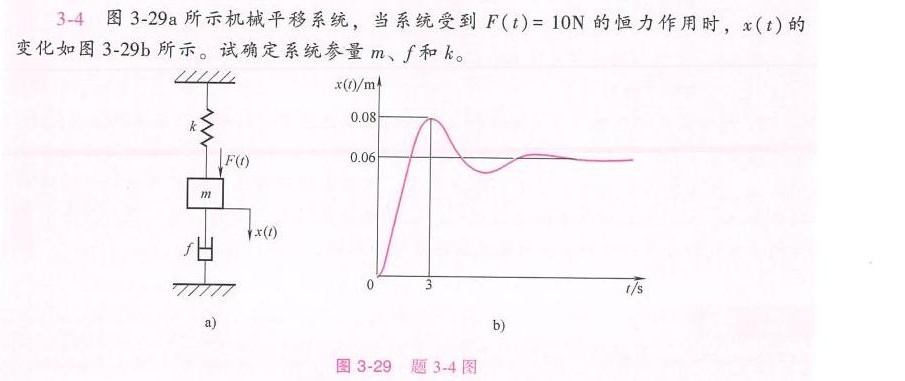
3-4 图 3-29a 所示机械平移系统,当系统受到 F(t)=10N 的恒力作用时,x(t)的-|||-变化如图 3-29b 所示。试确定系统参量m、f和k。-|||-∠ ∠ x(t)/m↑-|||-k 0.08-|||-F(t) 0.06-|||-m-|||-x(t)-|||-0 3 t/s-|||-a) b)
参考答案与解析:
-
相关试题
-
机械系统如图所示,其中,外力f(t)为系统的输入,位移x(t)为系统的输出,m为小车质量,k为弹簧的弹性系数,B为阻尼器的阻尼系数,试求系统的传递函数(忽略小车与地面的摩擦)。f(t)-|||-k x
-
机械系统如图所示,其中,外力f(t)为系统的输入,位移x(t)为系统的输出,m为小车质量,k为弹簧的弹性系数,B为阻尼器的阻尼系数,试求系统的传递函数(忽略小车
- 查看答案
-
F1-|||-A θ C-|||-M-|||-F2-|||-A B-|||-9-|||-3 3 3 3-|||-习题 2-29 图(尺寸单位:m )-|||-2-29 三铰拱架尺寸及所受载荷如图所示,
-
F1-|||-A θ C-|||-M-|||-F2-|||-A B-|||-9-|||-3 3 3 3-|||-习题 2-29 图(尺寸单位:m )-|||-2
- 查看答案
-
[例18] 设f(x)连续,试求下列函数的导数.-|||-(1) (int )_({e)^x}f(t)dt;-|||-(2) (int )_(0)^x(x-t)f(t)dt ;-|||-(3) (in
-
[例18] 设f(x)连续,试求下列函数的导数.-|||-(1) (int )_({e)^x}f(t)dt;-|||-(2) (int )_(0)^x(x-t)
- 查看答案
-
3-10 求习题 3-10 图所示各梁的约束反力-|||-F F F M-|||-
-
3-10 求习题 3-10 图所示各梁的约束反力-|||-F F F M-|||-
- 查看答案
-
如图所示系统中,k1=2×105N/m,k2=1×105N/m。激振力F=200sin50t,当系统发生共振时,质量m是( )。<br /><img border="0&
-
[单选题]如图所示系统中,k1=2×105N/m,k2=1×105N/m。激振力F=200sin50t,当系统发生共振时,质量m是( )。题58图A.80kg
- 查看答案
-
函数t()、f()的定义如下所示,若调用函数t时传递给x的值为3,并且调用函数f
-
[单选题]函数t()、f()的定义如下所示,若调用函数t时传递给x的值为3,并且调用函数f()时,第一个参数采用传值(callbyvalue)方式,第二个参数采用传引用(call by reference)方式,则函数t的返回值为(49)。A.35B.24C.22D.11
- 查看答案
-
[例18]设f(x )连续,试求下列函数的导数.-|||-(1)f(t)dt;-|||-(2) (int )_(0)^x(x-t)f(t)dt ;-|||-(3) (int )_(0)^xcos ((
-
[例18]设f(x )连续,试求下列函数的导数.-|||-(1)f(t)dt;-|||-(2) (int )_(0)^x(x-t)f(t)dt ;-|||-(3
- 查看答案
-
函数f(t)的图像如图所示,f(t)为()
-
[单选题]函数f(t)的图像如图所示,f(t)为()A .偶函数B .奇函数C .奇谐函数D .都不是
- 查看答案
-
5.物体A、B的 x-t 图像如图所示,由图可知 ()-|||-x/m A.-|||-10 B-|||-5-|||-0 1 2 3 4 5 t/s-|||-A.从第3s末起,两物体运动方向相同,且 _
-
5.物体A、B的 x-t 图像如图所示,由图可知 ()-|||-x/m A.-|||-10 B-|||-5-|||-0 1 2 3 4 5 t/s-|||-A.
- 查看答案
-
函数t()、f()的定义如下所示。若调用函数t()时传递给x的值为3,并且调
-
[单选题] 函数t()、f()的定义如下所示。若调用函数t()时传递给x的值为3,并且调用函数f()时,第一个参数采用传值(call by value)方式,第二个参数采用传引用(call by reference)方式,则函数t()的返回值为(33) 。
- 查看答案