一人能在静水中以1.10m·s-1 的速度划船前进.今欲横渡一宽为1.00 ×103m、水流速度为0.55m·s-1 的大河.(1) 他若要从出发点横渡该河而到达正对岸的一点,那么应如何确定划行方向? 到达正对岸需多少时间? (2)如果希望用最短的时间过河,应如何确定划行方向? 船到达对岸的位置在什么地方?分析 船到达对岸所需时间是由船相对于岸的速度v 决定的.由于水流速度u的存在, v与船在静水中划行的速度v′之间有v=u +v′(如图所示).若要使船到达正对岸,则必须使v沿正对岸方向;在划速一定的条件下,若要用最短时间过河,则必须使v 有极大值.题 1-27 图解 (1) 由v=u +v′可知题 1-27 图,则船到达正对岸所需时间为题 1-27 图(2) 由于题 1-27 图,在划速v′一定的条件下,只有当α=0 时, v 最大(即v=v′),此时,船过河时间t′=d /v′,船到达距正对岸为l 的下游处,且有题 1-27 图226.33在题3-30的冲击摆问题中,若以质量为m′ 的均匀细棒代替柔绳,子弹速度的最小值应是多少?分析 该题与习题3-30 的不同之处在于:(1) 子弹与摆锤的相互作用过程不再满足动量守恒,而应属于角动量守恒,这是因为细棒和摆锤是一整体,子弹与摆锤相互作用时,轴对杆有水平方向的分力作用,因此,对子弹与摆组成的系统而言,不能满足动量守恒的条件.但是,轴对杆的作用力和杆所受的重力对转动都不产生力矩,系统角动量守恒的条件却能满足.(2) 摆在转动过程中,就地球与摆组成的系统而言,满足机械能守恒定律.摆锤恰能通过最高点所需的速度,可直接应用机械能守恒定律去解.摆是刚体,摆锤与轴心之间的距离不可能发生改变.摆锤开始转动时的动能必须大于或等于转至最高点处所增加的势能.解 取子弹与摆为系统,根据系统的角动量守恒,有 (1)式中、和分别为子弹、摆锤和杆对轴的转动惯量.根据摆在转动过程中机械能守恒,有题 1-27 图 (2)由式(1)、(2)可得子弹速度的最小值为题 1-27 图227.15边长为a 的立方体如图所示,其表面分别平行于Oxy、Oyz 和Ozx 平面,立方体的一个顶点为坐标原点.现将立方体置于电场强度(k,E ,E 为常数)的非均匀电场中,求电场对立方体各表面及整个立方体表面的电场强度通量.题 1-27 图解 如图所示,由题意E 与Oxy 面平行,所以任何相对Oxy 面平行的立方体表面,电场强度的通量为零,即.而考虑到面CDEO 与面ABGF 的外法线方向相反,且该两面的电场分布相同,故有题 1-27 图同理 题 1-27 图题 1-27 图因此,整个立方体表面的电场强度通量题 1-27 图228.27一质量为1.12 kg,长为1.0 m 的均匀细棒,支点在棒的上端点,开始时棒自由悬挂.以100 N 的力打击它的下端点,打击时间为0.02 s.(1) 若打击前棒是静止的,求打击时其角动量的变化;(2) 棒的最大偏转角.题 1-27 图分析 该题属于常见的刚体转动问题,可分为两个过程来讨论:(1) 瞬间的打击过程.在瞬间外力的打击下,棒受到外力矩的角冲量,根据角动量定理,棒的角动量将发生变化,则获得一定的角速度.(2) 棒的转动过程.由于棒和地球所组成的系统,除重力(保守内力)外无其他外力做功,因此系统的机械能守恒,根据机械能守恒定律,可求得棒的偏转角度.解 (1) 由刚体的角动量定理得(2) 取棒和地球为一系统,并选O 处为重力势能零点.在转动过程中,系统的机械能守恒,即由式(1)、(2)可得棒的偏转角度为229.24有两块相距为0.50 的薄金属板A、B 构成的空气平板电容器被屏蔽在一金属盒K 内,金属盒上、下两壁与A、B 分别相距0.25mm,金属板面积为30 mm ×40 mm。求(1) 被屏蔽后电容器的电容变为原来的几倍;(2) 若电容器的一个引脚不慎与金属屏蔽盒相碰,问此时的电容又为原来的几倍?题 1-27 图分析 薄金属板A、B 与金属盒一起构成三个电容器,其等效电路图如图(B)所示,由于两导体间距离较小,电容器可视为平板电容器,通过分析等效电路图可以求得A、B 间的电容。解 (1) 由等效电路图可知由于电容器可以视作平板电容器,且题 1-27 图,故,因此A、B 间的总电容(2) 若电容器的一个引脚不慎与金属屏蔽盒相碰,相当于C2 (或者C3)极板短接,其电容为零,则总电容230.32 如图所示,A 与B 两飞轮的轴杆由摩擦啮合器连接,A 轮的转动惯量J =10.0 kg· m ,开始时B 轮静止,A 轮以n =600 r· min 的转速转动,然后使A 与B 连接,因而B 轮得到加速而A 轮减速,直到两轮的转速都等于n =200 r· min 为止.求:(1) B 轮的转动惯量;(2) 在啮合过程中损失的机械能.分析 两飞轮在轴方向啮合时,轴向力不产生转动力矩,两飞轮系统的角动量守恒,由此可求得B 轮的转动惯量.根据两飞轮在啮合前后转动动能的变化,即可得到啮合过程中机械能的损失.解 (1) 取两飞轮为系统,根据系统的角动量守恒,有题 1-27 图则B 轮的转动惯量为(2) 系统在啮合过程中机械能的变化为式中负号表示啮合过程中机械能减少.231.6一铁心上绕有线圈100匝,已知铁心中磁通量与时间的关系为,求在时,线圈中的感应电动势.分析 由于线圈有N 匝相同回路,线圈中的感应电动势等于各匝回路的感应电动势的代数和,在此情况下,法拉第电磁感应定律通常写成题 1-27 图,其中称为磁链.解 线圈中总的感应电动势当题 1-27 图时,.232.16如图(a)所示,飞轮的质量为60 kg,直径为0.50 m,转速为1.0 ×10r·min .现用闸瓦制动使其在5.0 s 内停止转动,求制动力F.设闸瓦与飞轮之间的摩擦因数 μ=0.40,飞轮的质量全部分布在轮缘上.题 1-27 图分析 飞轮的制动是闸瓦对它的摩擦力矩作用的结果,因此,由飞轮的转动规律可确定制动时所需的摩擦力矩.但是,摩擦力矩的产生与大小,是由闸瓦与飞轮之间的正压力F 决定的,而此力又是由制动力F 通过杠杆作用来实现的.所以,制动力可以通过杠杆的力矩平衡来求出.解 飞轮和闸杆的受力分析,如图(b)所示.根据闸杆的力矩平衡,有而,则闸瓦作用于轮的摩擦力矩为 (1)摩擦力矩是恒力矩,飞轮作匀角加速转动,由转动的运动规律,有题 1-27 图 (2)因飞轮的质量集中于轮缘,它绕轴的转动惯量,根据转动定律,由式(1)、(2)可得制动力题 1-27 图233.31 质量为0.50 kg,长为0.40 m 的均匀细棒,可绕垂直于棒的一端的水平轴转动.如将此棒放在水平位置,然后任其落下,求:(1) 当棒转过60°时的角加速度和角速度;(2) 下落到竖直位置时的动能;(3) 下落到竖直位置时的角速度.分析 转动定律M =Jα是一瞬时关系式,为求棒在不同位置的角加速度,只需确定棒所在位置的力矩就可求得.由于重力矩是变力矩,角加速度也是变化的,因此,在求角速度时,就必须根据角加速度用积分的方法来计算(也可根据转动中的动能定理,通过计算变力矩的功来求).至于棒下落到竖直位置时的动能和角速度,可采用系统的机械能守恒定律来解,这是因为棒与地球所组成的系统中,只有重力作功(转轴处的支持力不作功),因此,系统的机械能守恒.解 (1) 棒绕端点的转动惯量由转动定律M =Jα可得棒在θ 位置时的角加速度为题 1-27 图当θ =60°时,棒转动的角加速度由于题 1-27 图,根据初始条件对式(1)积分,有题 1-27 图则角速度为(2) 根据机械能守恒,棒下落至竖直位置时的动能为题 1-27 图(3) 由于该动能也就是转动动能,即题 1-27 图,所以,棒落至竖直位置时的角速度为234.1 电荷面密度均为+σ的两块“无限大”均匀带电的平行平板如图(A)放置,其周围空间各点电场强度E(设电场强度方向向右为正、向左为负)随位置坐标x 变化的关系曲线为图(B)中的( )分析与解 “无限大”均匀带电平板激发的电场强度为题 1-27 图,方向沿带电平板法向向外,依照电场叠加原理可以求得各区域电场强度的大小和方向.因而正确答案为(B).235.3下列说法正确的是( )
一人能在静水中以1.10m·s-1 的速度划船前进.今欲横渡一宽为1.00 ×103m、水流速度为0.55m·s-1 的大河.(1) 他若要从出发点横渡该河而到达正对岸的一点,那么应如何确定划行方向? 到达正对岸需多少时间? (2)如果希望用最短的时间过河,应如何确定划行方向? 船到达对岸的位置在什么地方?
分析 船到达对岸所需时间是由船相对于岸的速度v 决定的.由于水流速度u的存在, v与船在静水中划行的速度v′之间有v=u +v′(如图所示).若要使船到达正对岸,则必须使v沿正对岸方向;在划速一定的条件下,若要用最短时间过河,则必须使v 有极大值.
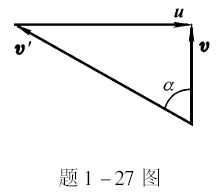
解 (1) 由v=u +v′可知 ,则船到达正对岸所需时间为
,则船到达正对岸所需时间为
(2) 由于 ,在划速v′一定的条件下,只有当α=0 时, v 最大(即v=v′),此时,船过河时间t′=d /v′,船到达距正对岸为l 的下游处,且有
,在划速v′一定的条件下,只有当α=0 时, v 最大(即v=v′),此时,船过河时间t′=d /v′,船到达距正对岸为l 的下游处,且有
226.33在题3-30的冲击摆问题中,若以质量为m′ 的均匀细棒代替柔绳,子弹速度的最小值应是多少?
分析 该题与习题3-30 的不同之处在于:(1) 子弹与摆锤的相互作用过程不再满足动量守恒,而应属于角动量守恒,这是因为细棒和摆锤是一整体,子弹与摆锤相互作用时,轴对杆有水平方向的分力作用,因此,对子弹与摆组成的系统而言,不能满足动量守恒的条件.但是,轴对杆的作用力和杆所受的重力对转动都不产生力矩,系统角动量守恒的条件却能满足.(2) 摆在转动过程中,就地球与摆组成的系统而言,满足机械能守恒定律.摆锤恰能通过最高点所需的速度,可直接应用机械能守恒定律去解.摆是刚体,摆锤与轴心之间的距离不可能发生改变.摆锤开始转动时的动能必须大于或等于转至最高点处所增加的势能.
解 取子弹与摆为系统,根据系统的角动量守恒,有
(1)
式中、和分别为子弹、摆锤和杆对轴的转动惯量.
根据摆在转动过程中机械能守恒,有
 (2)
(2)
由式(1)、(2)可得子弹速度的最小值为

227.15边长为a 的立方体如图所示,其表面分别平行于Oxy、Oyz 和Ozx 平面,立方体的一个顶点为坐标原点.现将立方体置于电场强度(k,E ,E 为常数)的非均匀电场中,求电场对立方体各表面及整个立方体表面的电场强度通量.
解 如图所示,由题意E 与Oxy 面平行,所以任何相对Oxy 面平行的立方体表面,电场强度的通量为零,即.而
考虑到面CDEO 与面ABGF 的外法线方向相反,且该两面的电场分布相同,故有
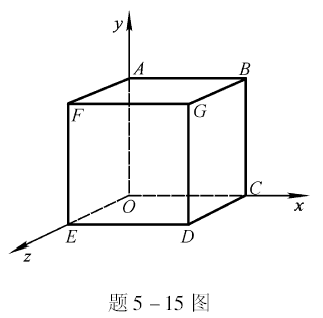
同理 

因此,整个立方体表面的电场强度通量

228.27一质量为1.12 kg,长为1.0 m 的均匀细棒,支点在棒的上端点,开始时棒自由悬挂.以100 N 的力打击它的下端点,打击时间为0.02 s.(1) 若打击前棒是静止的,求打击时其角动量的变化;(2) 棒的最大偏转角.

分析 该题属于常见的刚体转动问题,可分为两个过程来讨论:(1) 瞬间的打击过程.在瞬间外力的打击下,棒受到外力矩的角冲量,根据角动量定理,棒的角动量将发生变化,则获得一定的角速度.(2) 棒的转动过程.由于棒和地球所组成的系统,除重力(保守内力)外无其他外力做功,因此系统的机械能守恒,根据机械能守恒定律,可求得棒的偏转角度.
解 (1) 由刚体的角动量定理得
(2) 取棒和地球为一系统,并选O 处为重力势能零点.在转动过程中,系统的机械能守恒,即
由式(1)、(2)可得棒的偏转角度为
229.24有两块相距为0.50 的薄金属板A、B 构成的空气平板电容器被屏蔽在一金属盒K 内,金属盒上、下两壁与A、B 分别相距0.25mm,金属板面积为30 mm ×40 mm。求(1) 被屏蔽后电容器的电容变为原来的几倍;(2) 若电容器的一个引脚不慎与金属屏蔽盒相碰,问此时的电容又为原来的几倍?

分析 薄金属板A、B 与金属盒一起构成三个电容器,其等效电路图如图(B)所示,由于两导体间距离较小,电容器可视为平板电容器,通过分析等效电路图可以求得A、B 间的电容。
解 (1) 由等效电路图可知
由于电容器可以视作平板电容器,且 ,故,因此A、B 间的总电容
,故,因此A、B 间的总电容
(2) 若电容器的一个引脚不慎与金属屏蔽盒相碰,相当于C2 (或者C3)极板短接,其电容为零,则总电容
230.32 如图所示,A 与B 两飞轮的轴杆由摩擦啮合器连接,A 轮的转动惯量J =10.0 kg· m ,开始时B 轮静止,A 轮以n =600 r· min 的转速转动,然后使A 与B 连接,因而B 轮得到加速而A 轮减速,直到两轮的转速都等于n =200 r· min 为止.求:(1) B 轮的转动惯量;(2) 在啮合过程中损失的机械能.
分析 两飞轮在轴方向啮合时,轴向力不产生转动力矩,两飞轮系统的角动量守恒,由此可求得B 轮的转动惯量.根据两飞轮在啮合前后转动动能的变化,即可得到啮合过程中机械能的损失.
解 (1) 取两飞轮为系统,根据系统的角动量守恒,有
则B 轮的转动惯量为
(2) 系统在啮合过程中机械能的变化为
式中负号表示啮合过程中机械能减少.
231.6一铁心上绕有线圈100匝,已知铁心中磁通量与时间的关系为,求在时,线圈中的感应电动势.
分析 由于线圈有N 匝相同回路,线圈中的感应电动势等于各匝回路的感应电动势的代数和,在此情况下,法拉第电磁感应定律通常写成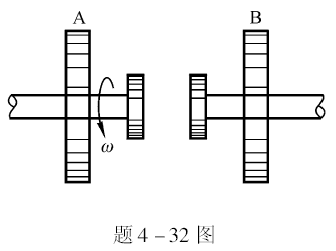 ,其中称为磁链.
,其中称为磁链.
解 线圈中总的感应电动势
当 时,.
时,.
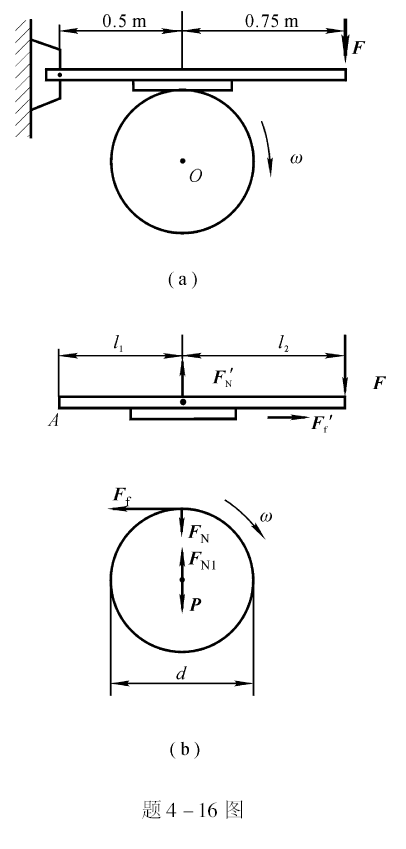
232.16如图(a)所示,飞轮的质量为60 kg,直径为0.50 m,转速为1.0 ×10r·min .现用闸瓦制动使其在5.0 s 内停止转动,求制动力F.设闸瓦与飞轮之间的摩擦因数 μ=0.40,飞轮的质量全部分布在轮缘上.

分析 飞轮的制动是闸瓦对它的摩擦力矩作用的结果,因此,由飞轮的转动规律可确定制动时所需的摩擦力矩.但是,摩擦力矩的产生与大小,是由闸瓦与飞轮之间的正压力F 决定的,而此力又是由制动力F 通过杠杆作用来实现的.所以,制动力可以通过杠杆的力矩平衡来求出.
解 飞轮和闸杆的受力分析,如图(b)所示.根据闸杆的力矩平衡,有
而,则闸瓦作用于轮的摩擦力矩为
(1)
摩擦力矩是恒力矩,飞轮作匀角加速转动,由转动的运动规律,有
 (2)
(2)
因飞轮的质量集中于轮缘,它绕轴的转动惯量,根据转动定律,由式(1)、(2)可得制动力
233.31 质量为0.50 kg,长为0.40 m 的均匀细棒,可绕垂直于棒的一端的水平轴转动.如将此棒放在水平位置,然后任其落下,求:(1) 当棒转过60°时的角加速度和角速度;(2) 下落到竖直位置时的动能;(3) 下落到竖直位置时的角速度.
分析 转动定律M =Jα是一瞬时关系式,为求棒在不同位置的角加速度,只需确定棒所在位置的力矩就可求得.由于重力矩是变力矩,角加速度也是变化的,因此,在求角速度时,就必须根据角加速度用积分的方法来计算(也可根据转动中的动能定理,通过计算变力矩的功来求).至于棒下落到竖直位置时的动能和角速度,可采用系统的机械能守恒定律来解,这是因为棒与地球所组成的系统中,只有重力作功(转轴处的支持力不作功),因此,系统的机械能守恒.
解 (1) 棒绕端点的转动惯量由转动定律M =Jα可得棒在θ 位置时的角加速度为
当θ =60°时,棒转动的角加速度
由于 ,根据初始条件对式(1)积分,有
,根据初始条件对式(1)积分,有

则角速度为
(2) 根据机械能守恒,棒下落至竖直位置时的动能为
(3) 由于该动能也就是转动动能,即 ,所以,棒落至竖直位置时的角速度为
,所以,棒落至竖直位置时的角速度为
234.1 电荷面密度均为+σ的两块“无限大”均匀带电的平行平板如图(A)放置,其周围空间各点电场强度E(设电场强度方向向右为正、向左为负)随位置坐标x 变化的关系曲线为图(B)中的( )
分析与解 “无限大”均匀带电平板激发的电场强度为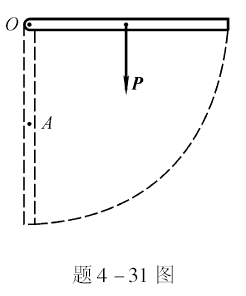 ,方向沿带电平板法向向外,依照电场叠加原理可以求得各区域电场强度的大小和方向.因而正确答案为(B).
,方向沿带电平板法向向外,依照电场叠加原理可以求得各区域电场强度的大小和方向.因而正确答案为(B).
235.3下列说法正确的是( )
A. 电场强度为零的点,电势也一定为零B. 电场强度不为零的点,电势也一定不为零
C. 电势为零的点,电场强度也一定为零
D. 电势在某一区域内为常量,则电场强度在该区域内必定为零
E. .
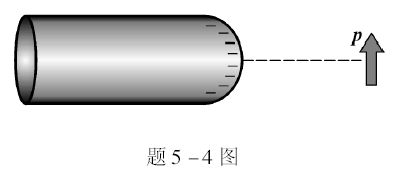
F. *5-4在一个带负电的带电棒附近有一个电偶极子,其电偶极矩p 的方向如图所示.当电偶极子被释放后,该电偶极子将( )
G. 沿逆时针方向旋转直到电偶极矩p 水平指向棒尖端而停止
沿逆时针方向旋转至电偶极矩p 水平指向棒尖端,同时沿电场线方向朝着棒尖端移动
沿逆时针方向旋转至电偶极矩p 水平指向棒尖端,同时逆电场线方向朝远离棒尖端移动
沿顺时针方向旋转至电偶极矩p 水平方向沿棒尖端朝外,同时沿电场线方向朝着棒尖端移动
.
的平行长直导线,它们中心距离为d.试求长为l
的一对导线的自感(导线内部的磁通量可略去不计).
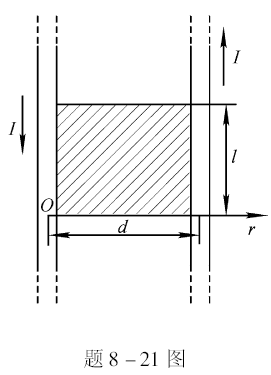
I,然后计算图中阴影部分(宽为d、长为l)的磁通量.该区域内磁场可以看成两无限长直载流导线分别在该区域产生的磁场的叠加.
I 时,两平行导线间的磁感强度为
穿过图中阴影部分的磁通量为

则长为l 的一对导线的自感为
L1 称为外自感,即本题已求出的L,L2 称为一根导线的内自感.长为l的导线的内自感
 ,有兴趣的读者可自行求解.
,有兴趣的读者可自行求解.
参考答案与解析:
-
相关试题
-
一人能在静水中以1.10mcdot (s)^-1的速度划船前进。今欲横渡一宽为1.00times (10)^3m、水流速度为0.55mcdot (s)^-1的大河。(1)他若要从出发点横渡该河而到达正
-
一人能在静水中以1.10mcdot (s)^-1的速度划船前进。今欲横渡一宽为1.00times (10)^3m、水流速度为0.55mcdot (s)^-1的大
- 查看答案
-
00times (10)^3m 水流速度为 .55mcdot (s)^-1 的大河,(1)他若要从出发点横渡该河而-|||-到达正对岸的一点,那么应如何确定划行方向?到达正对岸需多少时间?(2)-||
-
00times (10)^3m 水流速度为 .55mcdot (s)^-1 的大河,(1)他若要从出发点横渡该河而-|||-到达正对岸的一点,那么应如何确定划行
- 查看答案
-
一只船在静水中的速度为3m/s,它要横渡一条30m宽的河,水流速度为4m/s,下列说法正确的是( )
-
一只船在静水中的速度为3m/s,它要横渡一条30m宽的河,水流速度为4m/s,下列说法正确的是( )一只船在静水中的速度为3m/s,它要横渡一条30m宽的
- 查看答案
-
[例2]一小船渡河,河宽 =180m, 水流速度 _(1)=2.5m/s.-|||-若船在静水中的速度为 _(2)=5m/s, 求:-|||-(1)欲使船在最短的时间内渡河,船头应朝什么方向?用-||
-
[例2]一小船渡河,河宽 =180m, 水流速度 _(1)=2.5m/s.-|||-若船在静水中的速度为 _(2)=5m/s, 求:-|||-(1)欲使船在最短
- 查看答案
-
河宽425m,船在静水中速度为5m/s,水流速度是3m/s,则船过河的最短时间(
-
[单选题]河宽425m,船在静水中速度为5m/s,水流速度是3m/s,则船过河的最短时间()A .140sB .105sC .85sD . D.53s
- 查看答案
-
若河宽仍为100m,已知水流速度是4m/s,小船在静水中的速度是3m/s,即船速(静水中)小于水速.求:(1)欲使船渡河时间最短,船应该怎样渡河?(2)欲使航行距离最短,船应该怎样渡河?最短航线是河宽
-
若河宽仍为100m,已知水流速度是4m/s,小船在静水中的速度是3m/s,即船速(静水中)小于水速.求:(1)欲使船渡河时间最短,船应该怎样渡河?(2)欲使航行
- 查看答案
-
小船要横渡一条200m宽的河,船在静水中的航速是4m/s,问:(sin53°=0.8,cos53°=0.6)(1)当小船的船头始终正对对岸行驶时,它将在何时到达对岸?(2)若小船过河的最短位移为250
-
小船要横渡一条200m宽的河,船在静水中的航速是4m/s,问:(sin53°=0.8,cos53°=0.6)(1)当小船的船头始终正对对岸行驶时,它将在何时到达
- 查看答案
-
一列火车在雨中向东行驶,司机发现,当车速为5m•s-1时雨垂直下落,当车速为10m•s-1时雨与竖直方向成30°角,求雨对地速度的大小和方向。
-
一列火车在雨中向东行驶,司机发现,当车速为5m•s-1时雨垂直下落,当车速为10m•s-1时雨与竖直方向成30°角,求雨对地速度的大小和方向。一列火车在雨中向东
- 查看答案
-
一个质量为 M = 10 kg 的物体静止放在光滑水平面上,今有一质量为 m = 1 kg 的小球,以水平速度 v 0 = 4 m/s 飞来,与物体 M 正碰后以 v 1 = 2 m/s 的速度弹回,
-
一个质量为 M = 10 kg 的物体静止放在光滑水平面上,今有一质量为 m = 1 kg 的小球,以水平速度 v 0 = 4 m/s 飞来,与物体 M 正碰后
- 查看答案
-
某工程现场临时用水总量为Q=14.8(1/s),管网中水流速度ν=1.8(m/s
-
[单选题]某工程现场临时用水总量为Q=14.8(1/s),管网中水流速度ν=1.8(m/s),该工程现场施工用水的供水管径宜选用()mm水管。A .100B .150C .200
- 查看答案