如图所示,由杠杆和滑轮组合成的机械,已知L1=3L2,不计机械自重和摩擦,机械处于平衡状态时,正确的公式是()。
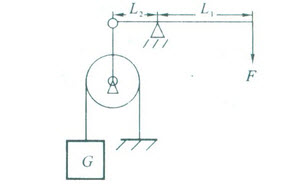
A . F=1/2G
B . F=2/3G
C . F=1/6G
D . F=3/2G
参考答案与解析:
-
相关试题
-
square -|||-square 实验小组探究影响滑轮组机械效率的因素的实验装置如图所示,实验数据如下表。 次数物理量 1 2 3
-
square -|||-square 实验小组探究影响滑轮组机械效率的因素的实验装置如图所示,实验数据如下表。 次数物理量
- 查看答案
-
利用如图甲所示的滑轮组提起一个重为2000N的物体,不计摩擦及滑轮自重,绳子的拉
-
[主观题]利用如图甲所示的滑轮组提起一个重为2000N的物体,不计摩擦及滑轮自重,绳子的拉力F等于多少?如果要用这个滑轮组达到更加省力的效果,绳子应该怎样绕?请再图乙中画出绳子的绕法,并计算此时拉力的大小。
- 查看答案
-
某机械企业在下料时需要把长度为L的钢材截成长度为L1和L2的两段,已知L服从均值
-
[单选题]某机械企业在下料时需要把长度为L的钢材截成长度为L1和L2的两段,已知L服从均值为10cm,标准差为0.4cm的正态分布,L1服从均值为5cm,标准差为0.3cm的正态分布,则关于L2的分布,下列说法正确的是()A . 一定不是正态分布B . 服从均值为5cm,标准差为0.1cm的正态分布C . 服从均值为5cm,标准差为0.5cm的正态分布D . 服从均值为5cm,标准差为0.7cm的正态分布
- 查看答案
-
图4-25所示起重机的平面构架,自重不计,且不计滑轮自重。已知F=100kN,L
-
[单选题]图4-25所示起重机的平面构架,自重不计,且不计滑轮自重。已知F=100kN,L=70cm,B、D、E为铰链连接,则支座A的约束力为()。A . FAX=100kN(←),F=150kN(↓)B . FAX=100kN(→),F=50kN(↑)C . FAX=100kN(←),F=50kN(↓)D . FAX=100kN(←),F=100kN(↓)
- 查看答案
-
山us-|||-F1 F、-|||-F3-|||-甲 乙 丙小明和小强设计了如图甲、乙所示两种滑轮组来提升同一重物,在讨论滑轮组机械效率时,两人产生了分歧,小明认为:“甲滑轮组的动滑轮总重小,机械效率
-
山us-|||-F1 F、-|||-F3-|||-甲 乙 丙小明和小强设计了如图甲、乙所示两种滑轮组来提升同一重物,在讨论滑轮组机械效率时,两人产生了分歧,小明
- 查看答案
-
在如图所示的电路中,正确的说法是 ( ) L2-|||-s1 L1 S2
-
在如图所示的电路中,正确的说法是 ( ) L2-|||-s1 L1 S2在如图所示的电路中,正确的说法是 ( )
- 查看答案
-
F1 F3-|||-F2-|||-B-|||-G如图所示的杠杆(自重和摩擦不计),O是支点,A处挂一重为50N的物体,为保证杠杆在水平位置平衡,在中点B处沿____(选填“F1 F3-|||-F2-|
-
F1 F3-|||-F2-|||-B-|||-G如图所示的杠杆(自重和摩擦不计),O是支点,A处挂一重为50N的物体,为保证杠杆在水平位置平衡,在中点B处沿__
- 查看答案
-
(4)如图所示,L1、L2为所取的安培环路,则在图(a)中, _({l)_(1)}^-}(H)_(1)Hcdot dl= __ 在图-|||-(b)中, _({l)_(2)}Hcdot dl= __-
-
(4)如图所示,L1、L2为所取的安培环路,则在图(a)中, _({l)_(1)}^-}(H)_(1)Hcdot dl= __ 在图-|||-(b)中, _({
- 查看答案
-
已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和
-
[问答题] 已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。物料搬动机械手结构原理图
- 查看答案
-
画出如图所示物体C和BE杆的受力图(BE杆自重不计)。
-
[问答题] 画出如图所示物体C和BE杆的受力图(BE杆自重不计)。
- 查看答案