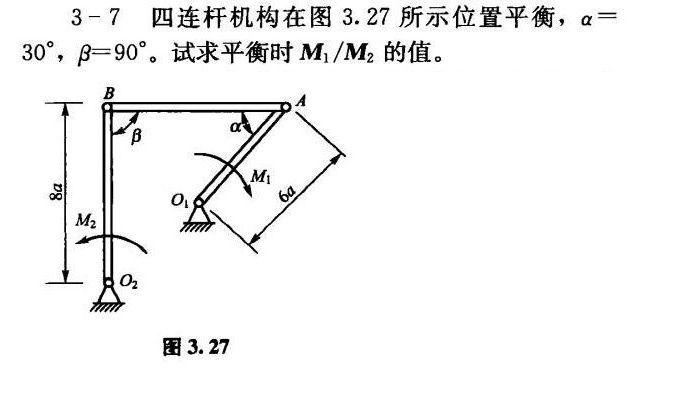
3-7 四连杆机构在图3.27所示位置平衡, =-|||-30°, beta =(90)^circ 试求平衡时 _(1)/(M)_(2) 的值。-|||-B A-|||-β α-|||-品 O1 60-|||-M1-|||-M2 加-|||-O2-|||-tm-|||-图3.27
参考答案与解析:
-
相关试题
-
.3-7 四连杆机构在图示位置时平衡, alpha =(30)^circ beta =(90)^circ 。试求平衡时 _(1)/(M)_(2)-|||-的值。-|||-B A-|||-β-|||
-
.3-7 四连杆机构在图示位置时平衡, alpha =(30)^circ beta =(90)^circ 。试求平衡时 _(1)/(M)_(2)-|||-的
- 查看答案
-
2-7 铰接四连杆机构OA BO1在题图所示位置平衡,已知 =0.4m, _(1)B=0.6m, 一-|||-个力偶作用在曲柄OA上,其力偶矩 _(1)=1Ncdot m, 另一个力偶M2作用在杆O1
-
2-7 铰接四连杆机构OA BO1在题图所示位置平衡,已知 =0.4m, _(1)B=0.6m, 一-|||-个力偶作用在曲柄OA上,其力偶矩 _(1)=1Nc
- 查看答案
-
在图4-53所示四连杆机构中,杆CA的角速度ω1与杆DB的角速度&o
-
[单选题]在图4-53所示四连杆机构中,杆CA的角速度ω1与杆DB的角速度ω2的关系为()。A . ω2=OB . ω2<ω1C . ω1<ω2D . ω2=ω1
- 查看答案
-
已知四连杆机构中=1,=1,OA以=1绕O轴转动。求:(1) AB杆的角速度;(2) B点的速度。
-
已知四连杆机构中=1,=1,OA以=1绕O轴转动。求:(1) AB杆的角速度;(2) B点的速度。已知四连杆机构中,,OA以绕O轴转动。求:(1) AB杆的
- 查看答案
-
2-19 四连杆机构OABO1在图示位置平衡,已知 =40cm, ,B=60cm, 作用在曲-|||-柄OA上的力偶矩大小为 _(1)=1 Ncdot m, 不计杆重。求力偶矩M2的大小及连杆AB所
-
2-19 四连杆机构OABO1在图示位置平衡,已知 =40cm, ,B=60cm, 作用在曲-|||-柄OA上的力偶矩大小为 _(1)=1 Ncdot m,
- 查看答案
-
[题目]-|||-在四连杆机构的A BCD的铰链B和C上分别作用有-|||-力F1和F2,机构在图示位置平衡.试求二力F1和F2-|||-之间的关系.-|||-c-|||-B 45 30 60°-||
-
[题目]-|||-在四连杆机构的A BCD的铰链B和C上分别作用有-|||-力F1和F2,机构在图示位置平衡.试求二力F1和F2-|||-之间的关系.-|||-
- 查看答案
-
例6 已知四连杆机构中_(1)B=1,_(1)B=1,_(1)B=1,OA以_(1)B=1绕O轴转动。求:(1)AB杆的角速度; (2)B和D点的速度。_(1)B=1
-
例6 已知四连杆机构中_(1)B=1,_(1)B=1,_(1)B=1,OA以_(1)B=1绕O轴转动。求:(1)AB杆的角速度; (2)B和D点的速度。_(1)
- 查看答案
-
图所示曲柄连杆机构处于平衡状态时,则()。
-
[单选题]图所示曲柄连杆机构处于平衡状态时,则()。A . 杆OA,AB都是二力杆B . 仅杆OA是二力杆C . 仅杆AB是二力杆D . 杆OA与AB都不是二力杆
- 查看答案
-
53.四连杆机构如图所示,已知曲柄O1 A长为r,且 _(1)A=(O)_(2)B, _(1)(O)_(2)=AB=2b, 角速度为w,角加-|||-速度为α,则杆AB的中点M的速度、法向和切向加速度
-
53.四连杆机构如图所示,已知曲柄O1 A长为r,且 _(1)A=(O)_(2)B, _(1)(O)_(2)=AB=2b, 角速度为w,角加-|||-速度为α,
- 查看答案
-
2-7试计算图2-43所示齿轮一连杆组合机构的自由度
-
2-7试计算图2-43所示齿轮一连杆组合机构的自由度2-7试计算图2-43所示齿轮一连杆组合机构的自由度
- 查看答案