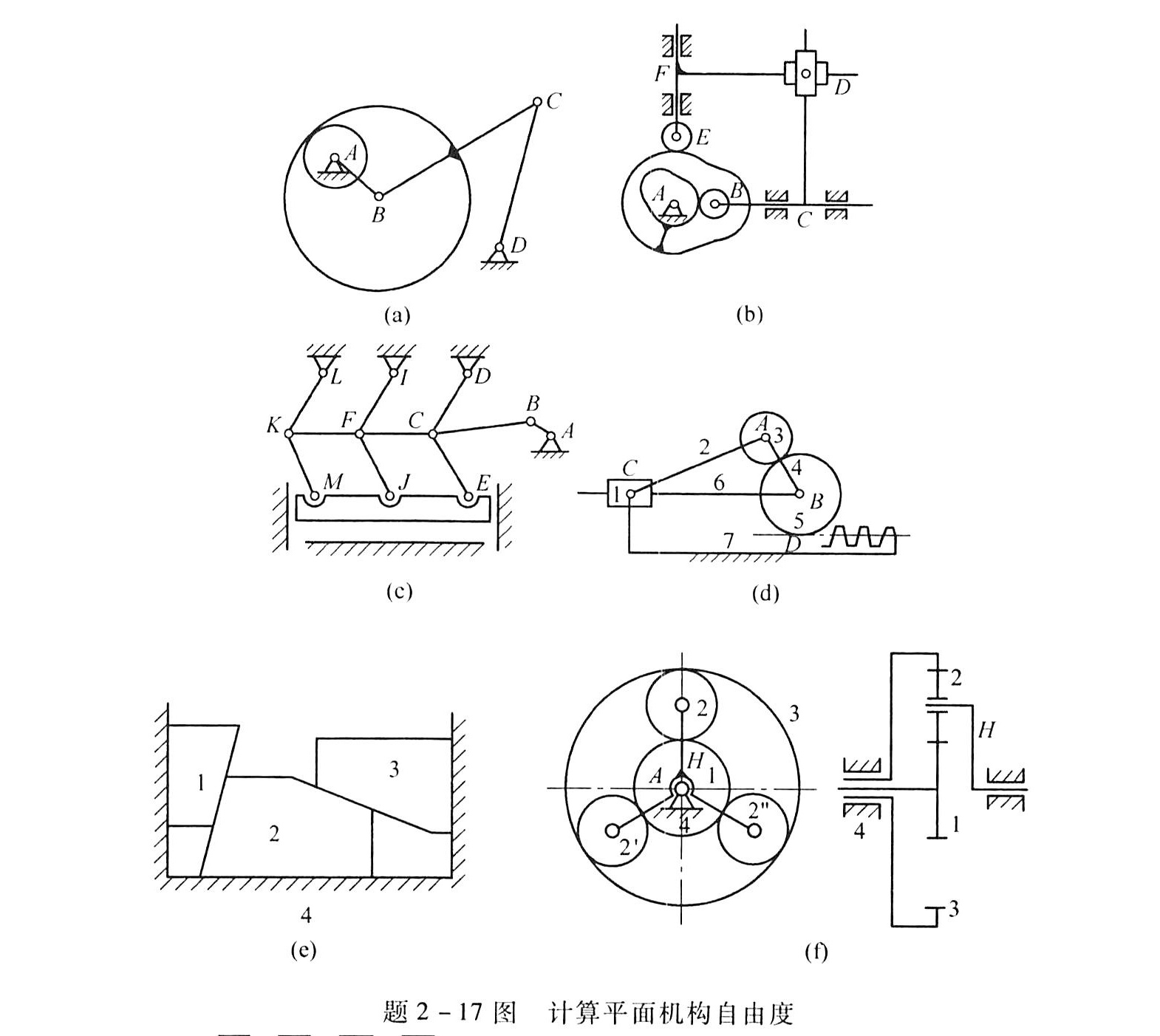
.2-17 .图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在D处为铰接在一起的两个滑-|||-块);图c为一精压机构;图e为一楔块机构;图f为一齿轮系机构。试计算如图所示各机构的自由度,并问在图-|||-d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同,为什么?.2-17 .图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在D处为铰接在一起的两个滑-|||-块);图c为一精压机构;图e为一楔块机构;图f为一齿轮系机构。试计算如图所示各机构的自由度,并问在图-|||-d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同,为什么?

参考答案与解析:
-
相关试题
-
.2-17 图 2-58a 、d为齿轮-连杆组合机构;图 2-58b 为凸轮-连杆组合机构(图中在D处为铰接在一-|||-起的两个滑块);图 -(58)^circ C 为一精压机构;图 -580 为一
-
.2-17 图 2-58a 、d为齿轮-连杆组合机构;图 2-58b 为凸轮-连杆组合机构(图中在D处为铰接在一-|||-起的两个滑块);图 -(58)^cir
- 查看答案
-
2-7试计算图2-43所示齿轮一连杆组合机构的自由度
-
2-7试计算图2-43所示齿轮一连杆组合机构的自由度2-7试计算图2-43所示齿轮一连杆组合机构的自由度
- 查看答案
-
图所示某齿轮机构,已知
-
[问答题] 图所示某齿轮机构,已知
- 查看答案
-
指出下两图所示各机构的复合铰链、局部自由度和虚约束,计算机构的自由度,并判断它们
-
[问答题] 指出下两图所示各机构的复合铰链、局部自由度和虚约束,计算机构的自由度,并判断它们是否具有确定的运动。
- 查看答案
-
试计算图 2 — 29 所示机构的自由度,并判断机构是否具有确定的运动(图中绘有箭头的构件为原动件)。若含有复合铰链、局部自由度和虚约束,需分别指出。(c)
-
试计算图 2 — 29 所示机构的自由度,并判断机构是否具有确定的运动(图中绘有箭头的构件为原动件)。若含有复合铰链、局部自由度和虚约束,需分别指出。(c)试计
- 查看答案
-
图所示曲柄连杆机构处于平衡状态时,则()。
-
[单选题]图所示曲柄连杆机构处于平衡状态时,则()。A . 杆OA,AB都是二力杆B . 仅杆OA是二力杆C . 仅杆AB是二力杆D . 杆OA与AB都不是二力杆
- 查看答案
-
机构自由度为2的轮系称为()
-
[单选题]机构自由度为2的轮系称为()A . 差动轮系B . 定轴轮系C . 行星轮系D . 简单行星轮系
- 查看答案
-
图示为一凸轮[1]连杆[2]机构,已知凸轮为原动件, angle CD=11angle GE=11angle HF,试计算该机构的自由度.若有复合铰链、局部自由度、虚约束,请指出它们的位置.
-
图示为一凸轮[1]连杆[2]机构,已知凸轮为原动件, angle CD=11angle GE=11angle HF,试计算该机构的自由度.若有复合铰链、局部自由
- 查看答案
-
2-3 画出题 2-3 图所示各机构的传动角和压力角。图中标注箭头的构件为原动件。-|||-C p-|||-D-|||-B-|||-A e-|||-F-|||-D-|||-题 2-2 图-|||-7-
-
2-3 画出题 2-3 图所示各机构的传动角和压力角。图中标注箭头的构件为原动件。-|||-C p-|||-D-|||-B-|||-A e-|||-F-|||-
- 查看答案
-
计算图1-3-1机构的自由度。[厦门大学2011研]图1-3
-
计算图1-3-1机构的自由度。[厦门大学2011研]图1-3计算图1-3-1机构的自由度。[厦门大学2011研]图1-3
- 查看答案